Process:
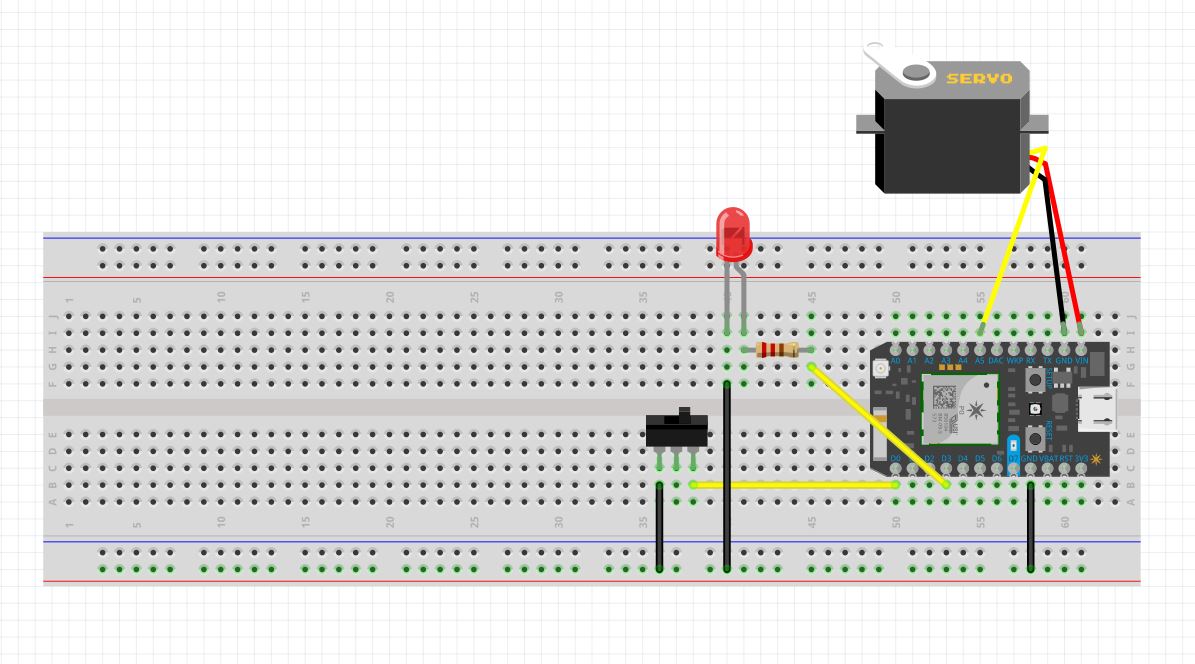
As a starting point, I began with the precedent from hackster.io “DIY Arduino Cat Feeder”. In that process, I encountered problems with the servo and photon. I initially thought I overheated and broke my photon but through tinkering tests with the Particle app, I discovered that I burnt out the A3 pin. Thus, I moved the servo's data input from A3 to A5.
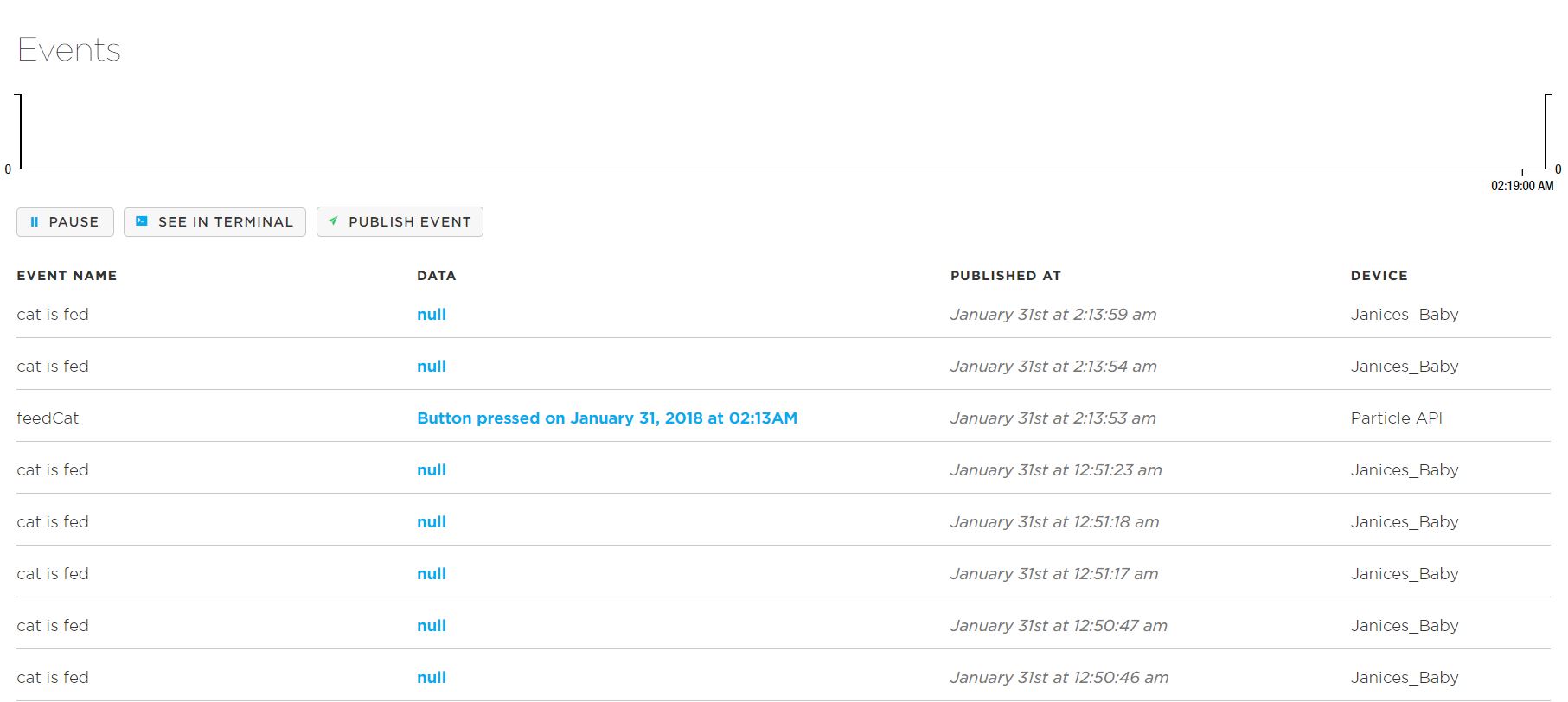
Although the servo was moving, it wasn’t moving in an intentional method. I went through variations of coding and testing to finally get the servo to move to 170 degrees and back to its original position. After successfully getting the servo to move with a micro switch input, I wanted to be able to remotely access the device, so I established an IFTTT push trigger. IFTTT managed to publish an event on my Particle console, but it was not connecting to the photon. To troubleshoot it, I tested with a LED to see if it was connected. Through that process, I established a problem with the code. There was extraneous information under the void myHandler code which was solved when I took it out. Now it works!