Process
1. Designing and wiring the circuits
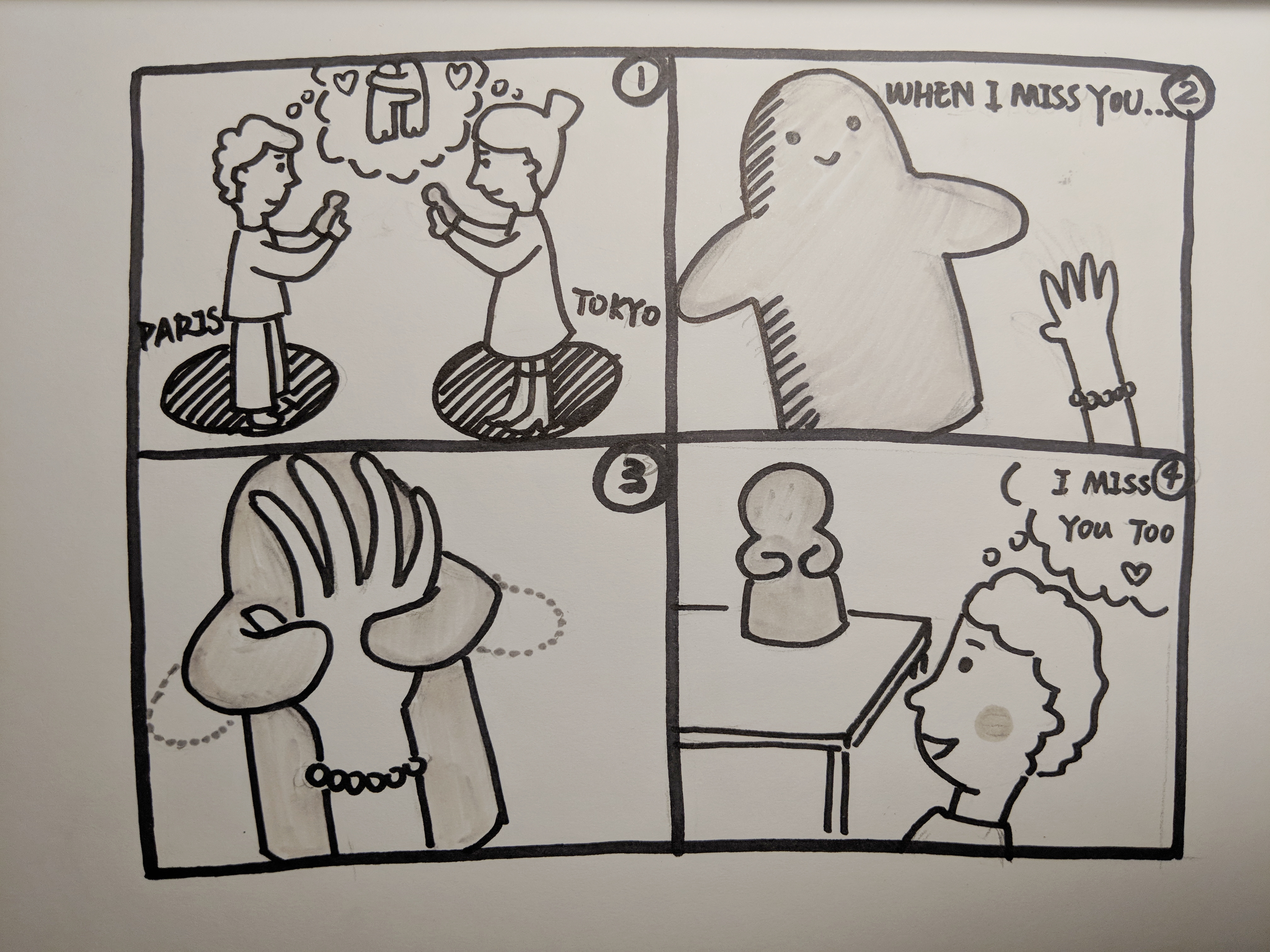
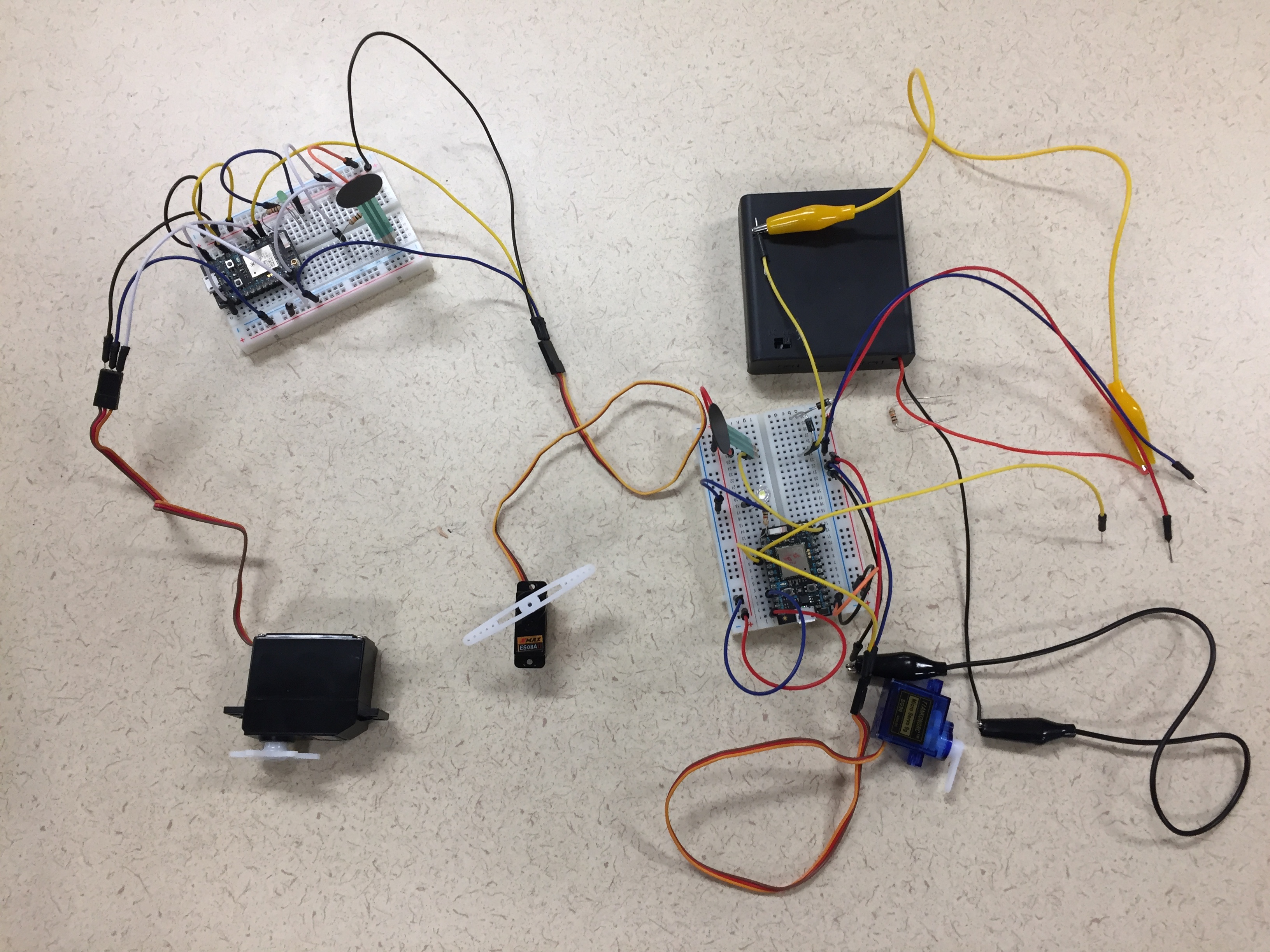
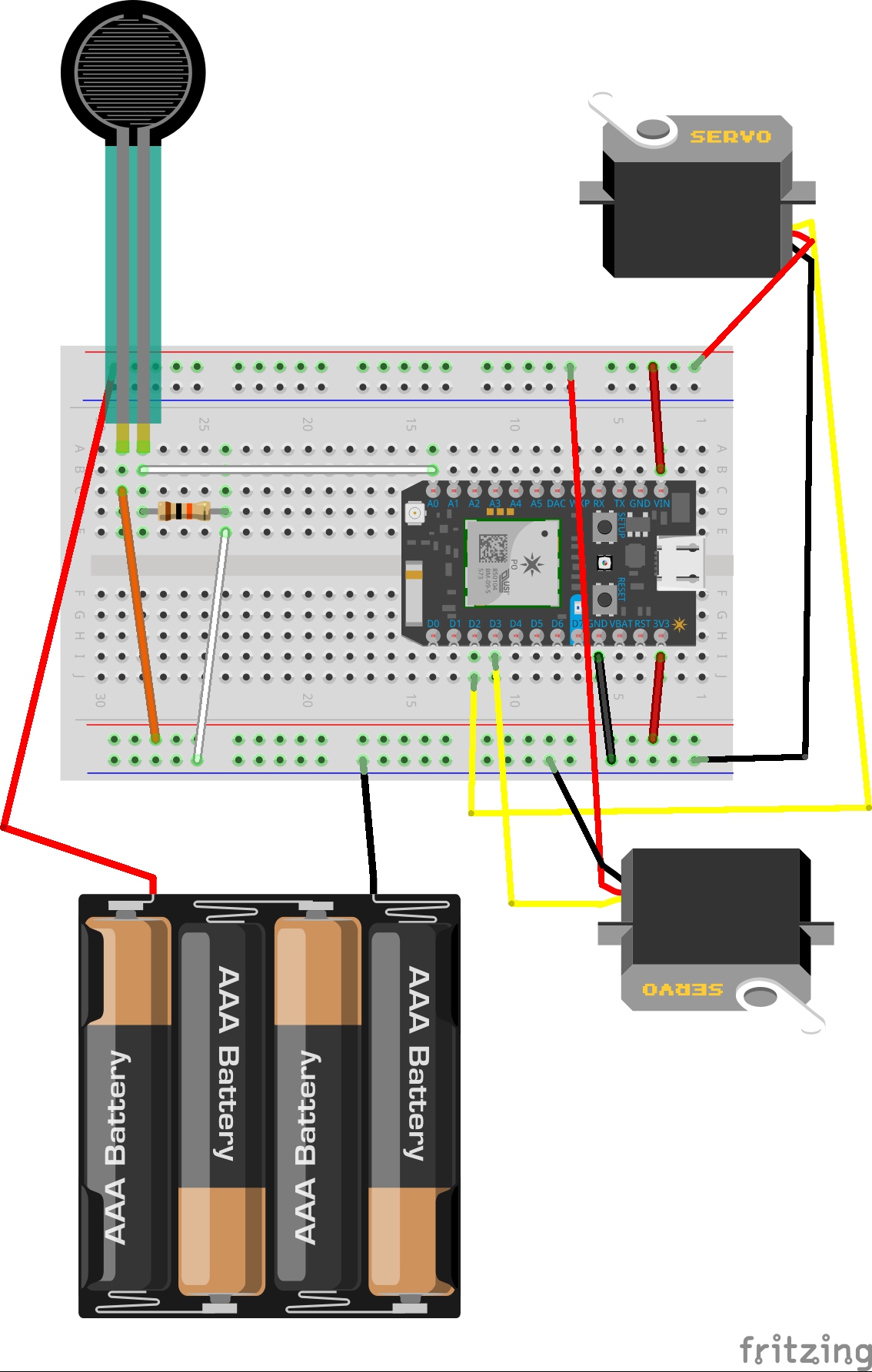
We developed two identical circuits for our paired devices. Each circuit has one FSR (Force Sensitive Resistor) and two Servos. Before we used the servos, we used one LED to check whether the FSR worked. For the concept to work, the FSR has to receive the data inputs and then servos output a rotating motion. Once the Photon gets an input from the FSR, the two servos of the paired device rotate their rotors. Thus, the servos represent the hugging arm, responding to the pressing action of the user.
2. Coding
As we followed the basic steps of connecting FSR, we encountered some problems. Servos of one device failed to respond to the data input from the other paired device. The possible reason behind this would be the poor internet condition which led to the Photon needing to reset sporadically and causing a very long delay. Moreover, we spent a long time to deal with our code to publish and subscribe Particle events for both devices.
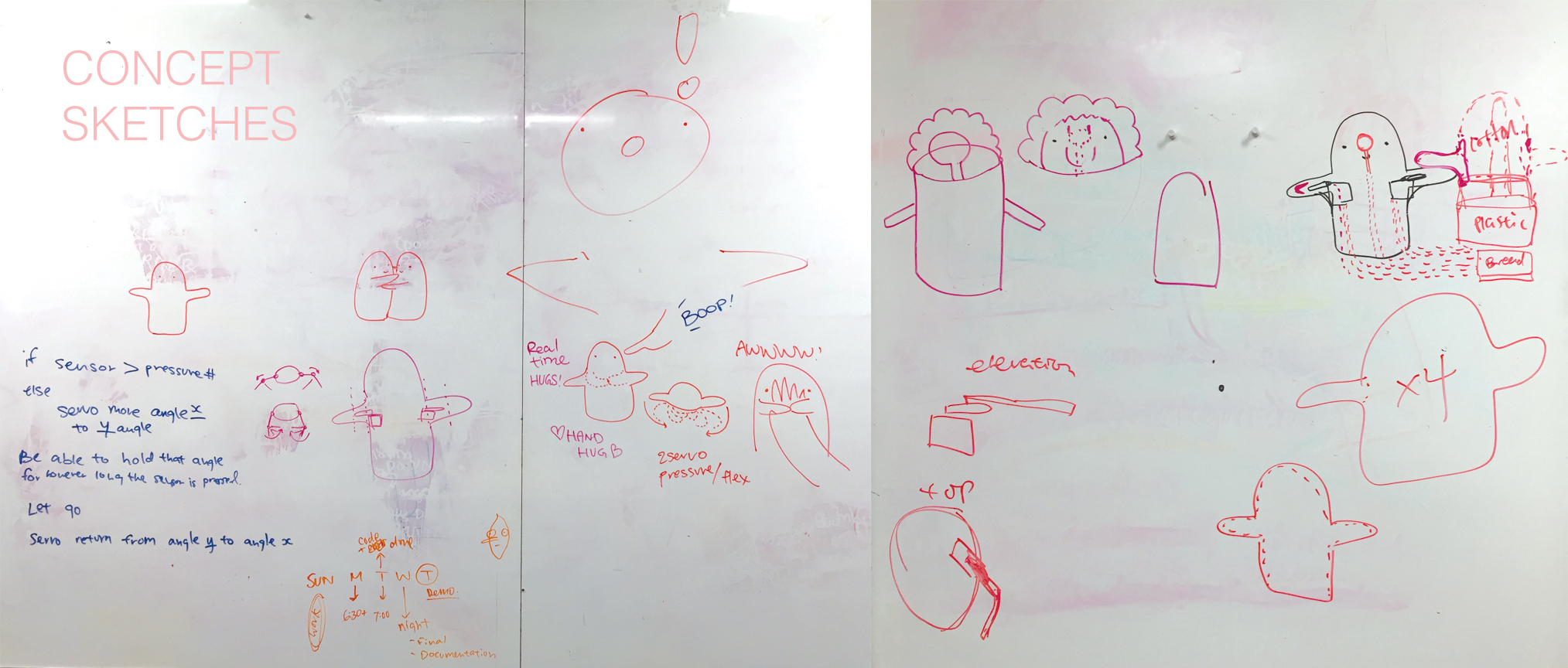
3. Building the device
Next, we constructed a prototype of our figurine. We create patterns to test the size and used it to cut on parts to be sewn together. We sewed two identical patterns to build the body of our paired devices. We filled the body with cotton to express the soft touch of the body. Servo panels were built into the arms of the figurine.