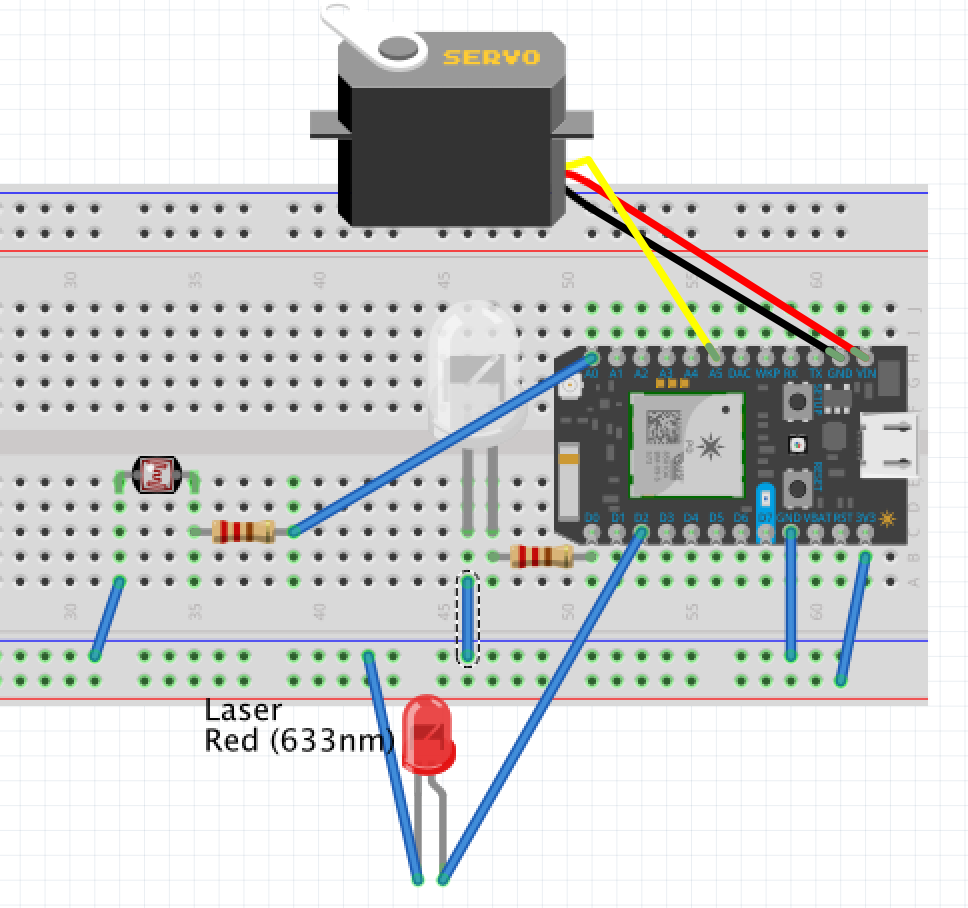
The device is composed of a servo with a laser. A Particle Photon controls the servo routine, and the device is triggered by a motion sensor. The motion sensor has a lag time to allow for the routine to play out and the cat to leave.
Set-up instructions:
1. Register Particle Photon.
Either download Particle Dev or use Particle IDE to write and flash firmware. The Photon can be powered via laptop/desktop USB or power bricks. Each requires 4.8 V DC.
2. Assemble the servo kit, mount it to a stable surface, and attach the laser to the servo arm. For the last step, I used a rubber band.
3. Test the servo to check arm positioning and range.
4. Adjust angles and delays in laser movement, then flash it to servo Photon.
5. Assemble motion sensor and check photoresistor readings, adjusting beamThreshold level in "Motion Sensor" to 400.
6. Flash "Motion Sensor" to the Photon.
7. Test, adjust delay under "Motion Sensor" as needed.