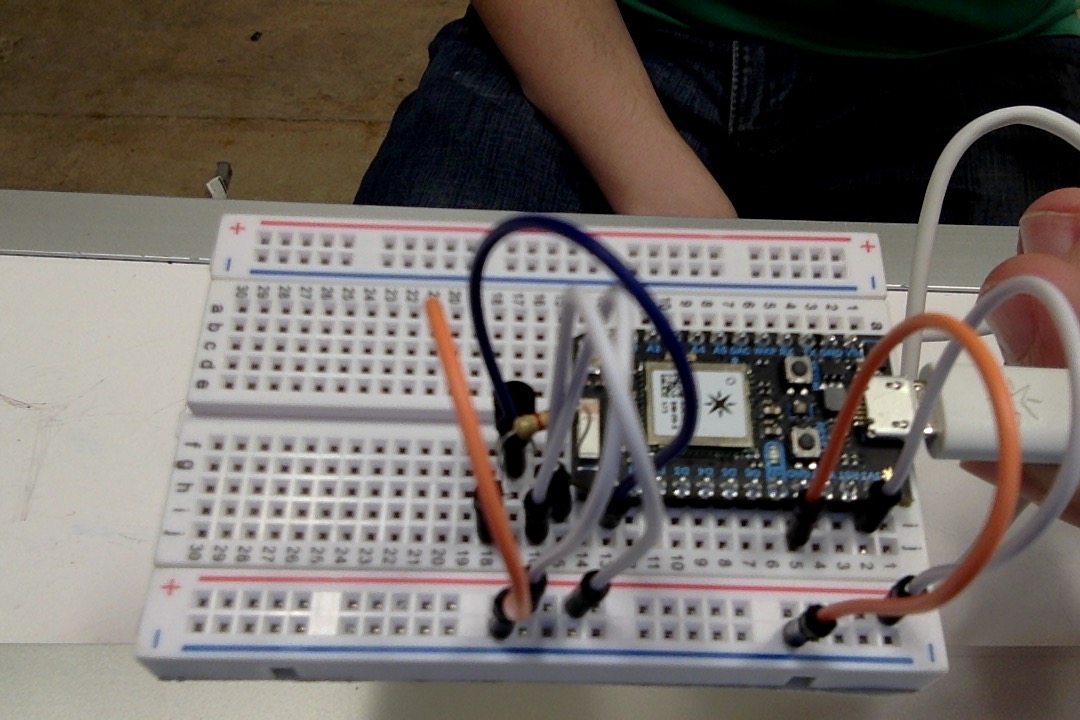
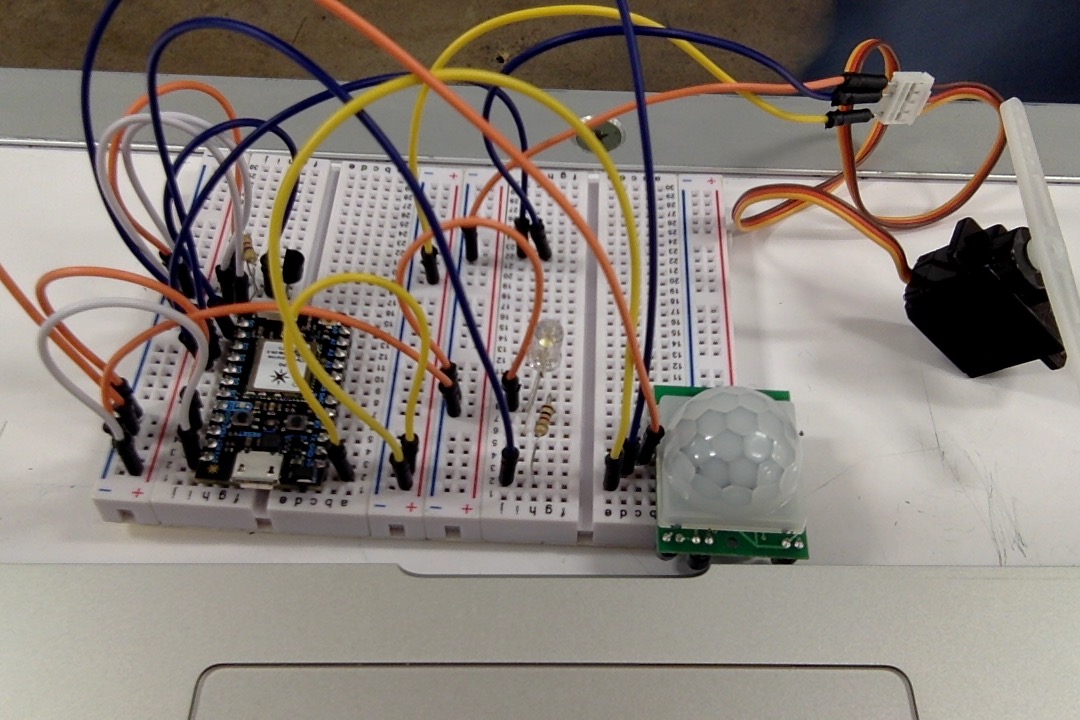
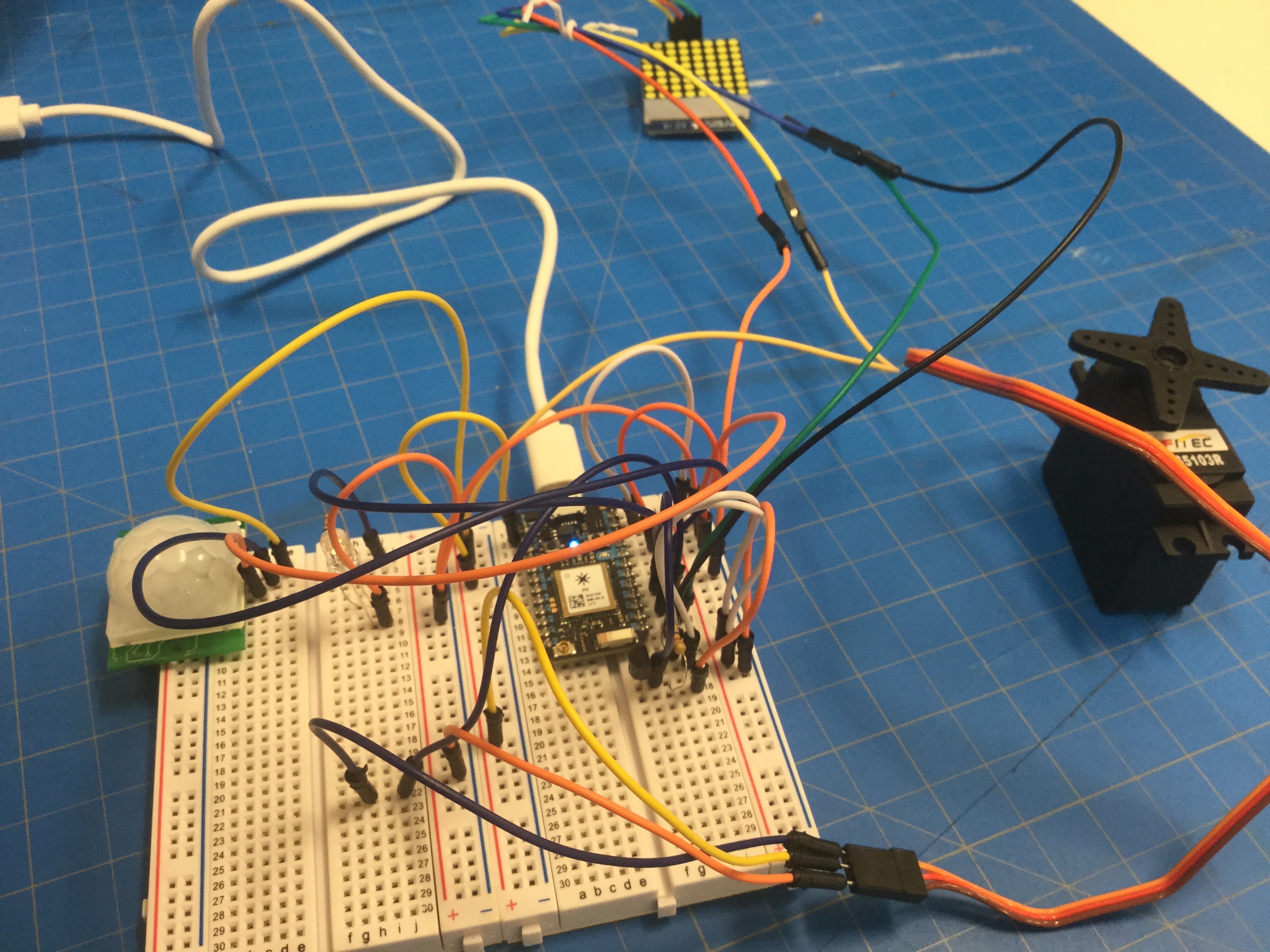
A thermal comparison tool that actuates a vent when dwellers are in its proximity.
Problem:
My parents' house has a pretty antiquated ventilation system, resulting in drastic temperature differences on each floor. Whether doing chores, using the computer, or watching TV, they can stay in the finished basement for a sustained period of time. It can be stressful, especially when they care about the other floor temperatures as well.
The vent is the main problem, as it focuses heat, and can only be fully opened or closed. The vent can a hassle and easily forgotten until the difference is so great, the ventilation system cannot overcome the disparity, making for an uncomfortable home environment.
Objectives:
- Device shall measure the ambient temperature in degrees Fahrenheit
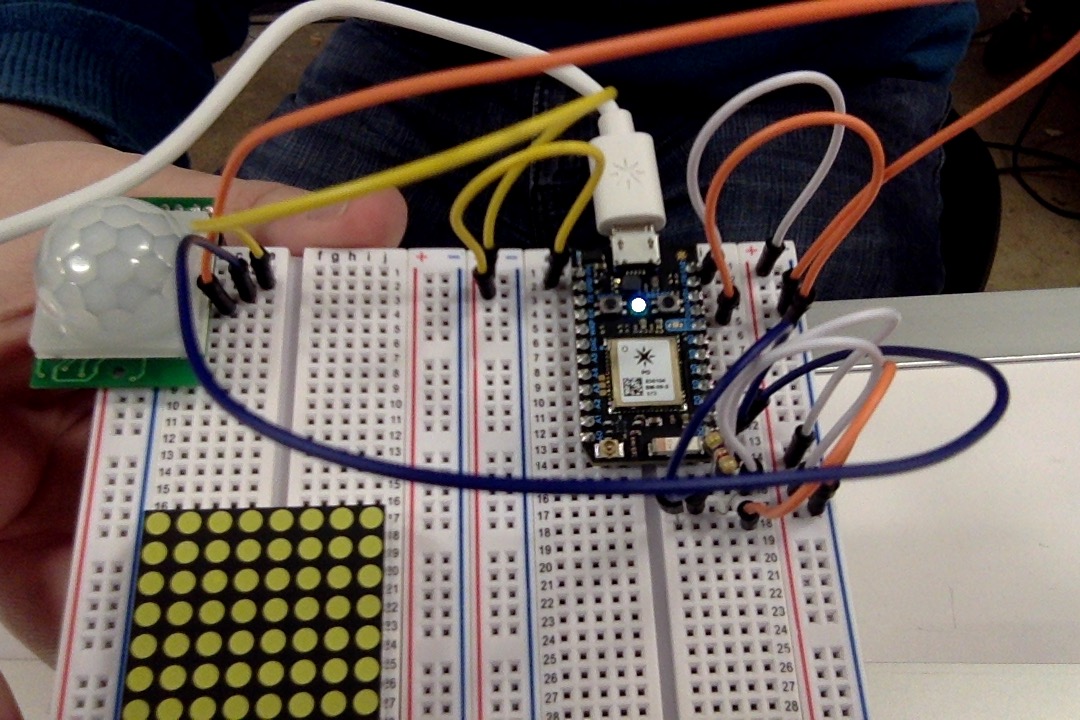
- Device shall detect proximate motion and store such status for a period of time, indicating that a user is operating in its area
- Device shall visually indicate that motion is currently being detected
- Device must message the user that a significant temperature differential has been detected
- Device must not consecutively take action and message the user within a short period
/*
* Project Thermal-Compare
* Description:
* Author: Nicholas Stone
* Date: 1/29/2017
* Version: 1
*/
#include "OneWire.h"
#include "spark-dallas-temperature.h"
//instances
OneWire oneWire(D0);
DallasTemperature dallas(&oneWire);
//vars
// double tempC = 0.0;
double tempF = 0.0;
void setup() {
//Register
// Particle.variable("tempC", &tempC, DOUBLE);
Particle.variable("tempF", &tempF, DOUBLE);
//start library
dallas.begin();
}
void loop() {
//request conversion
dallas.requestTemperatures();
//get temperature in Celsius and convert to Fahrenheit
tempF = (double)DallasTemperature::toFahrenheit(dallas.getTempCByIndex(0));
delay(5000);
}
/*
* Project Thermal-Compare
* Description:
* Author: Nicholas Stone
* Date: 1/29/2017
* Version: 2
*/
#include "OneWire.h"
#include "spark-dallas-temperature.h"
//instances
OneWire oneWire(D0);
DallasTemperature dallas(&oneWire);
//vars
// double tempC = 0.0;
int tempF = 0;
int MasterTempF = 70;
int MaxTempDiff = 1;
//Sample Rate est (Loop Rate)
int sampleRate = 5000;
//Burst Rate of published messages (15 minutes)
int burstRate = 900000;
int timeSincePublish= 900000;
//motion read
int motionPin = D1;
int motionValue = 0;
int motionState = 0;
int motionRate = 900000;
int timeSinceMotion = 0;
//LED
int ledPin = D2;
void setup() {
//Register
// Particle.variable("tempC", &tempC, DOUBLE);
Particle.variable("tempF", &tempF, INT);
//Particle.variable("motion",&motionValue,INT);
//Particle.variable("tSincePublish",&timeSincePublish,INT);
Particle.variable("tSinceMotion",&timeSinceMotion,INT);
Particle.variable("motionStatus",&motionState,INT);
pinMode(motionPin, INPUT);
pinMode(ledPin, OUTPUT);
//start library
dallas.begin();
}
void loop() {
//check motion
motionValue = digitalRead(motionPin);
if(motionValue == 1) {
motionState = 1;
timeSinceMotion = 0;
digitalWrite(ledPin, HIGH);
} else{if(timeSinceMotion>=motionRate) {
motionState = 0;
digitalWrite(ledPin, LOW);
} else {
timeSinceMotion = timeSinceMotion + sampleRate;
digitalWrite(ledPin, LOW);
}
}
//request conversion
dallas.requestTemperatures();
//get temperature in Celsius and convert to Fahrenheit
tempF = (int)DallasTemperature::toFahrenheit(dallas.getTempCByIndex(0));
//check if difference exceeds configuration and enough time has passed since the last publication
if(abs(tempF - MasterTempF)>MaxTempDiff && timeSincePublish>=burstRate){
Particle.publish("TempDiffExceeded", "true");
// reset burst rate time counter
timeSincePublish = 0;
}
timeSincePublish = timeSincePublish + sampleRate;
delay(sampleRate);
}
/*
* Project Thermal-Compare
* Description:
* Author: Nicholas Stone
* Date: 1/29/2017
* Version: 3
*/
#include "OneWire.h"
#include "spark-dallas-temperature.h"
//instances
OneWire oneWire(D0);
DallasTemperature dallas(&oneWire);
//vars
// double tempC = 0.0;
int tempF = 0;
int MasterTempF = 80;
int MaxTempDiff = 1;
//Sample Rate est (Loop Rate)
int sampleRate = 1000;
//Burst Rate of published messages (15 minutes)
int burstRate = 900000;
int timeSincePublish= 900000;
//motion read
int motionPin = D1;
int motionValue = 0;
int motionState = 0;
int motionRate = 900000;
int timeSinceMotion = 0;
//LED
int ledPin = D2;
//Fan / Servo
int servoPin = D3;
Servo fanServo;
int servoPos = 0;
void setup() {
//Register
// Particle.variable("tempC", &tempC, DOUBLE);
Particle.variable("tempF", &tempF, INT);
//Particle.variable("motion",&motionValue,INT);
//Particle.variable("tSincePublish",&timeSincePublish,INT);
Particle.variable("tSinceMotion",&timeSinceMotion,INT);
//Particle.variable("motionStatus",&motionState,INT);
pinMode(motionPin, INPUT);
pinMode(ledPin, OUTPUT);
fanServo.attach(D3);
//start library
dallas.begin();
}
void loop() {
//check motion
motionValue = digitalRead(motionPin);
if(motionValue == 1) {
motionState = 1;
timeSinceMotion = 0;
digitalWrite(ledPin, HIGH);
} else{if(timeSinceMotion>=motionRate) {
motionState = 0;
digitalWrite(ledPin, LOW);
} else {
timeSinceMotion = timeSinceMotion + sampleRate;
digitalWrite(ledPin, LOW);
}
}
//request conversion
dallas.requestTemperatures();
//get temperature in Celsius and convert to Fahrenheit
tempF = (int)DallasTemperature::toFahrenheit(dallas.getTempCByIndex(0));
//check if difference exceeds configuration and enough time has passed since the last publication
if(abs(tempF - MasterTempF)>MaxTempDiff && timeSincePublish>=burstRate
//&& motionState == 0
)
{
Particle.publish("TempDiffExceeded", "true");
// reset burst rate time counter
timeSincePublish = 0;
//run fan
fanServo.write(90);
fanServo.write(0);
fanServo.write(90);
fanServo.write(0);
}
timeSincePublish = timeSincePublish + sampleRate;
delay(sampleRate);
}
/*int fanControl(INT inAngle)
{
servoPos = constrain(inAngle,0,180);
fanServo.write(servoPos);
return 1;
}*/
/*
* Project Thermal-Compare
* Description:
* Author: Nicholas Stone
* Date: 1/29/2017
* Version: 4
*/
#include "OneWire.h"
#include "spark-dallas-temperature.h"
#include "Adafruit_LEDBackpack.h"
#include "Adafruit_GFX.h"
#include "glcdfont.h"
//instances
OneWire oneWire(D2);
DallasTemperature dallas(&oneWire);
//vars
int tempF = 0;
int MasterTempF = 70;
int MaxTempDiff = 5;
//Sample Rate est (Loop Rate)
int sampleRate = 1000;
//Burst Rate of published messages (15 minutes)
int burstRate = 900000;
int timeSincePublish= 0;
//motion read
int motionPin = D5;
int motionValue = 0;
int motionState = 0;
int motionRate = 900000;
int timeSinceMotion = 0;
//LED
int ledPin = D4;
//Fan / Servo
int servoPin = D3;
Servo fanServo;
//LED Array
Adafruit_8x8matrix ledMatrix = Adafruit_8x8matrix();
void setup() {
Particle.variable("tempF", &tempF, INT);
Particle.variable("motionStatus",&motionState,INT);
//negates burstRate at startup
timeSincePublish = burstRate;
pinMode(motionPin, INPUT);
pinMode(ledPin, OUTPUT);
fanServo.attach(servoPin);
//start interface
ledMatrix.begin(0x70);
ledMatrix.setCursor(0,0);
//start library
dallas.begin();
}
void loop() {
//check motion, run low if no motion after set time
motionValue = digitalRead(motionPin);
if(motionValue == 1) {
motionState = 1;
timeSinceMotion = 0;
digitalWrite(ledPin, HIGH);
} else{if(timeSinceMotion>=motionRate) {
motionState = 0;
digitalWrite(ledPin, LOW);
} else {
timeSinceMotion = timeSinceMotion + sampleRate;
digitalWrite(ledPin, LOW);
}
}
//request conversion
dallas.requestTemperatures();
//get temperature in Celsius and convert to Fahrenheit
tempF = (int)DallasTemperature::toFahrenheit(dallas.getTempCByIndex(0));
ledMatrix.fillRect(2,2, 4,4, LED_ON);
ledMatrix.writeDisplay();
//check if difference exceeds configuration and enough time has passed since the last publication
if(abs(tempF - MasterTempF)>MaxTempDiff && timeSincePublish>=burstRate && motionState == 1
)
{
//Particle.publish("TempPhoneCall","true");
if(tempF<MasterTempF) {
Particle.publish("Colder", "true");
} else {
Particle.publish("Warmer", "true");
}
// reset burst rate time counter
timeSincePublish = 0;
//
ledMatrix.clear();
ledMatrix.print("NO");
ledMatrix.writeDisplay();
//run fan for 10 seconds
fanServo.write(180);
delay(10000);
fanServo.write(91);
}
timeSincePublish = timeSincePublish + sampleRate;
delay(sampleRate);
}

Hardware Inspiration:
https://www.wired.com/2015/01/brilliant-air-vents-never-knew-needed/
Software Inspiration:
The main inspiration used were the following libraries:
Adafruit Ported LED Array Library
Spark Dallas Temperature
OneWire
Share this Project
Focused on
About
A thermal comparison tool that actuates a vent when dwellers are in its proximity.
Created
February 2nd, 2017