49-713 Designing for the Internet of Things
· 26 members
A hands-on introductory course exploring the Internet of Things and connected product experiences.
Found in Devices for Sharing - Connected Intimacy · UNLISTED (SHOWN IN POOLS)
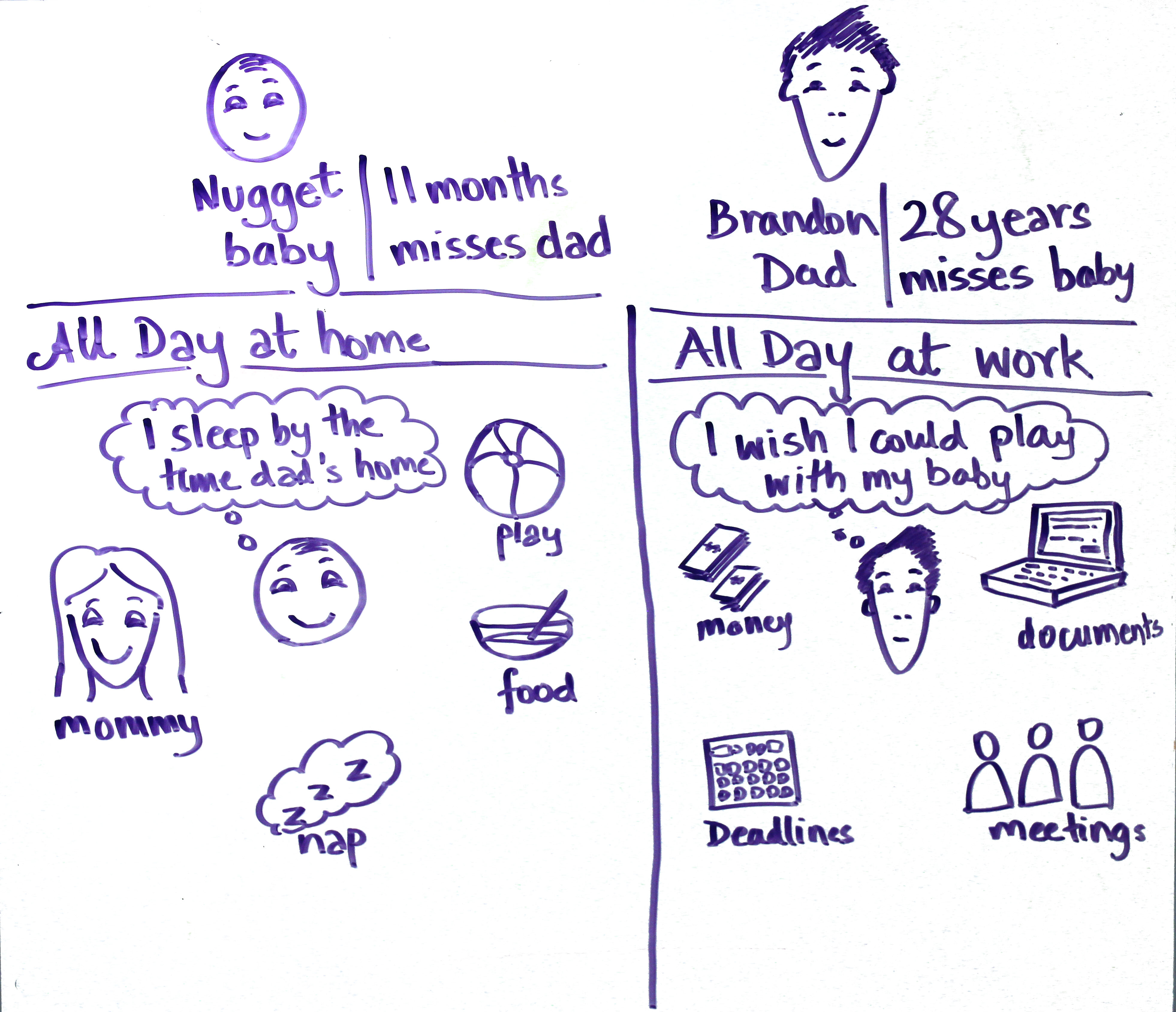
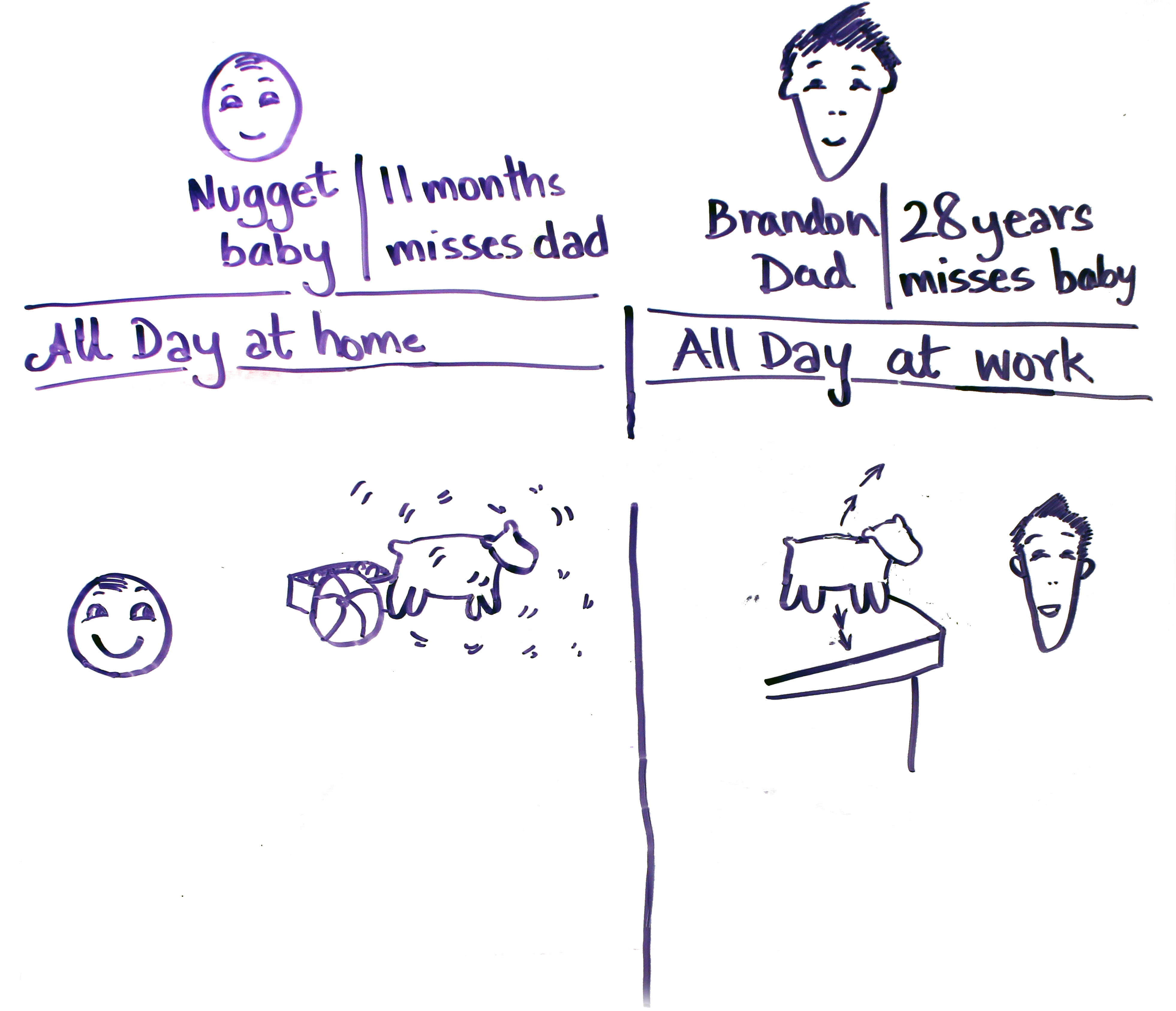
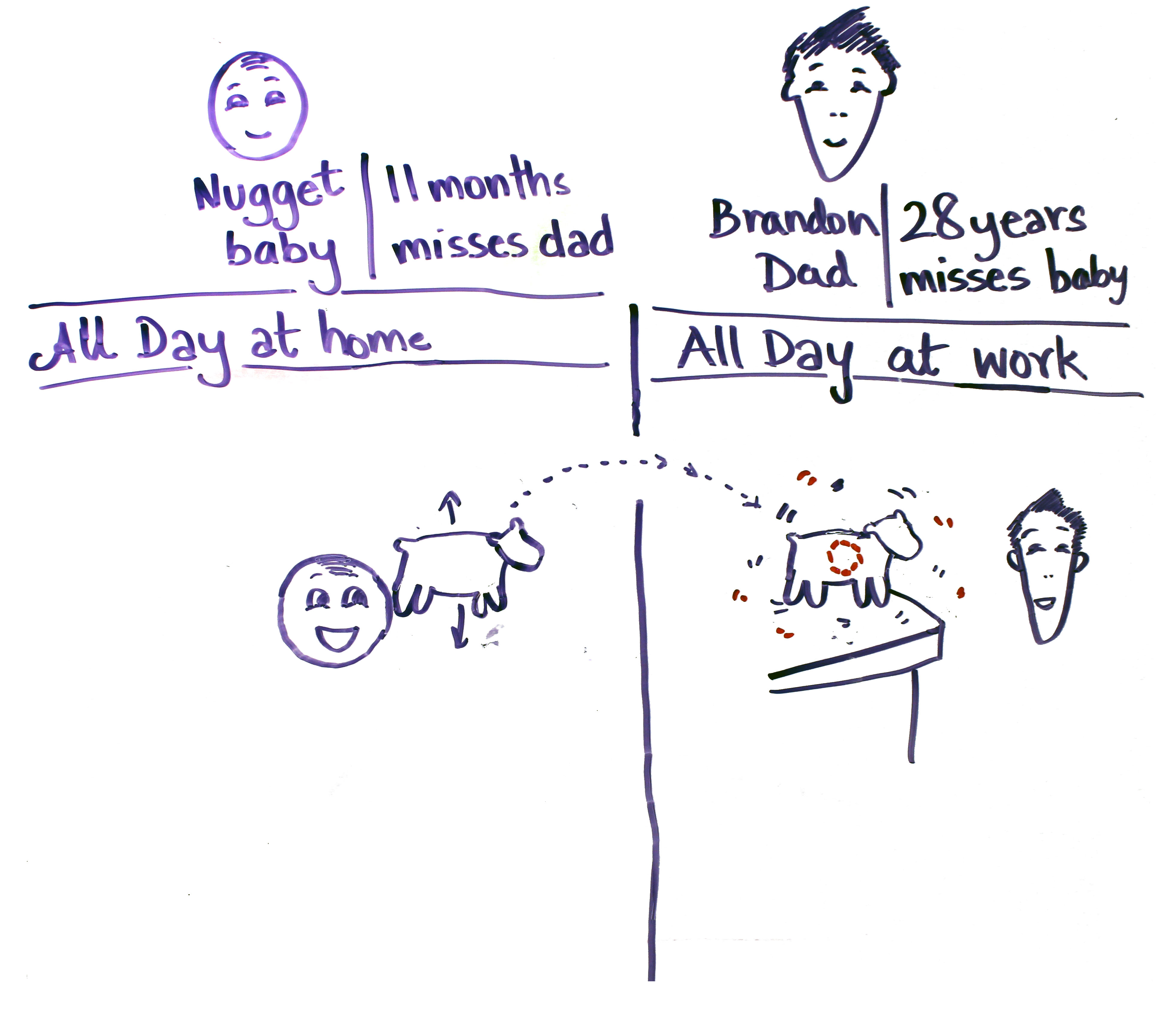
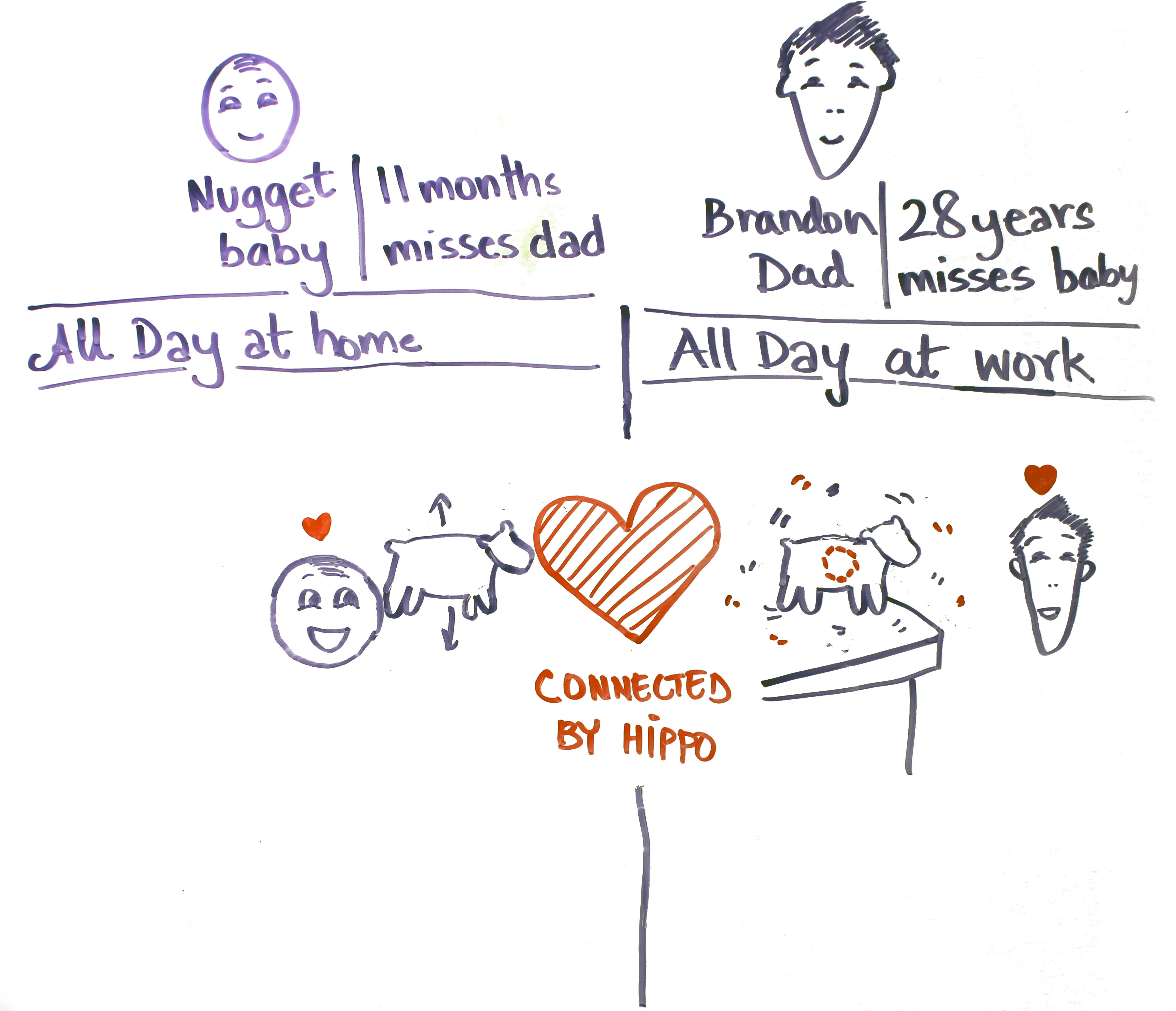
This pair of connected soft toys help new parents connect with their babies even when they are away at work.
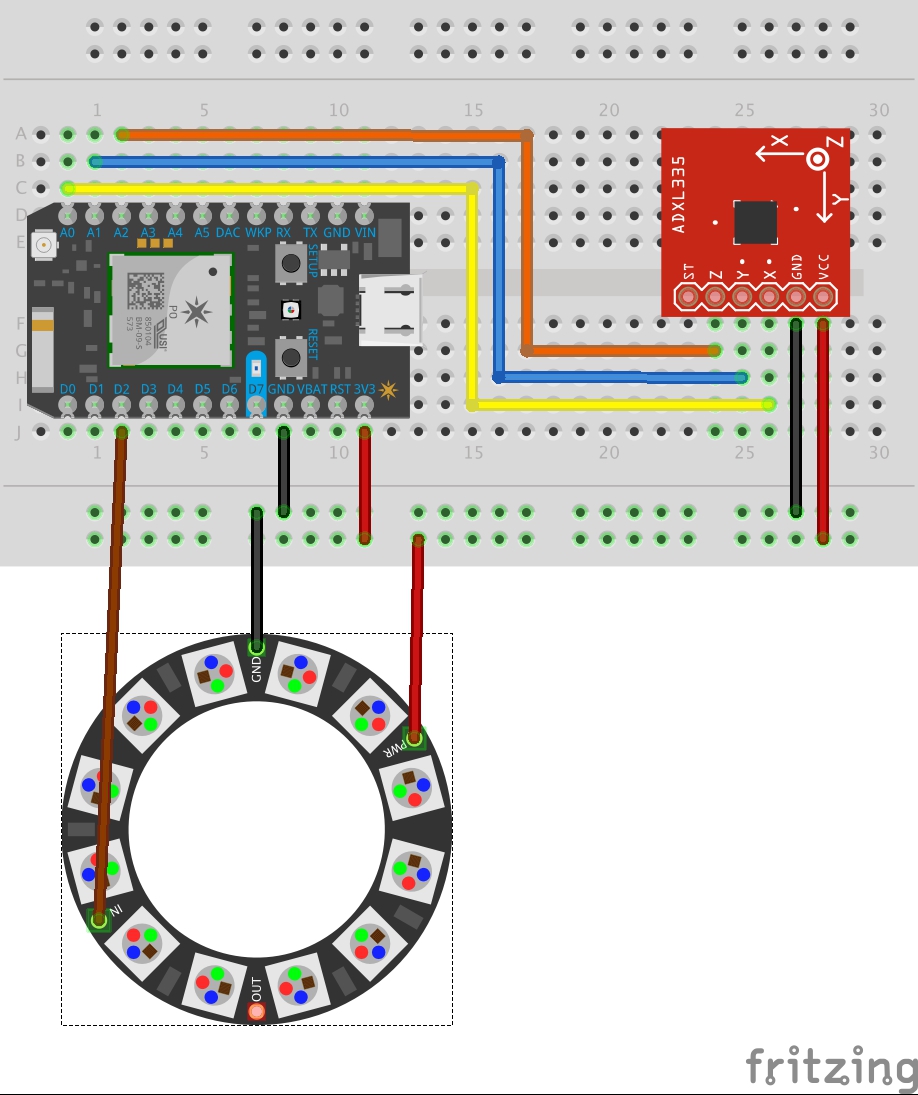
//http://projectlab.engphys.ubc.ca/coursearchive/apsc150-electronics-2013/accelerometer-adxl335-on-gy-61-breakout-board/
//http://bildr.org/2011/04/sensing-orientation-with-the-adxl335-arduino/
//A gyro is great at measuring rotation, but has no understanding of orientation.
//An accelerometer is good at determining orientation, but has no ability to keep track during rotation.
#include "math.h"
//Analog read pins
const int xPin = A0;
const int yPin = A1;
const int zPin = A2;
/////////servo stuff/////////
int monitorlight = D7; //Light for testing
const int pwr_off = 0; //Sets analog signal to 0
int servoPin = D3;
Servo myServo;
int servoPos = 0;
int pos1= 90;
int pos2 = 50;
int quickness = 25;
//////Shake Variables//////////
int shake_type = 1;
int shake_iterations = 5;
int count = 0;
int thres_count = 2;
int last_zaverage = 2000;
int thres_shake = 3;
bool shake = FALSE;
bool event_being_pub = FALSE;
//The minimum and maximum values that came from
//the accelerometer while standing still
//You very well may need to change these
int minVal = 0;
int maxVal = 10000;
//to hold the caculated values
double x;
double y;
double z;
//variables for low pass filter
const int numReadings = 100;
int readIndex = 0;
int xtotal = 0;
int xaverage = 0;
int xreadings[numReadings];
int ytotal = 0;
int yaverage = 0;
int yreadings[numReadings];
int ztotal = 0;
int zaverage = 0;
int zreadings[numReadings];
void setup(){
Serial.begin(9600);
Particle.variable("window", &numReadings, INT);
Particle.variable("count", &count, INT);
Particle.variable("pos1", &pos1, INT);
Particle.variable("pos2", &pos2, INT);
Particle.variable("quickness", &quickness, INT);
Particle.function("window size", window_size);
Particle.subscribe("bz/new_shake",event_driven);
pinMode(D7, OUTPUT);
for (int thisReading = 0; thisReading < numReadings; thisReading++)
{
xreadings[thisReading] = 0;
yreadings[thisReading] = 0;
zreadings[thisReading] = 0;
}
pinMode(monitorlight, OUTPUT); //The light on the photon is set up for testing
myServo.attach( servoPin );
//Register our Particle to control the servo
Particle.function("servo", servoControl);
// Keep a cloud variable for the current position
Particle.variable( "servoPos" , &servoPos , INT );
Particle.function( "pos1", position1);
Particle.function( "pos2", position2);
Particle.function( "quickness", quick);
/*Particle.function("shake_iterations", shake_iterate);
Particle.function("shake_type", shaking_type);*/
// myServo.write(pos1);
}
void loop(){
//initialize the arrays for the rolling average that will serve as allow pass filter
//read the analog values from the accelerometer
int xRead = analogRead(xPin);
int yRead = analogRead(yPin);
int zRead = analogRead(zPin);
// subtract the last reading:
xtotal = xtotal - xreadings[readIndex];
ytotal = ytotal - yreadings[readIndex];
ztotal = ztotal - zreadings[readIndex];
// read from the sensor:
xreadings[readIndex] = analogRead(xPin);
yreadings[readIndex] = analogRead(yPin);
zreadings[readIndex] = analogRead(zPin);
// add the reading to the total:
xtotal = xtotal + xreadings[readIndex];
ytotal = ytotal + yreadings[readIndex];
ztotal = ztotal + zreadings[readIndex];
// advance to the next position in the array:
readIndex = readIndex + 1;
// if we're at the end of the array...
if (readIndex >= numReadings) {
// ...wrap around to the beginning:
readIndex = 0;
}
// calculate the average:
xaverage = xtotal / numReadings;
yaverage = ytotal / numReadings;
zaverage = ztotal / numReadings;
// send it to the computer as ASCII digit
//output reading to serial connection
send_info_to_serial(xRead, xaverage, yRead, yaverage, zRead, zaverage);
delay(1);//just here to slow down the serial output - Easier to read
//save filtered signal to check for delta
count++;
if (count == thres_count)
{ last_zaverage = zaverage;
count = 0;
}
//check for change in accelerometer
if ((abs(zaverage-last_zaverage) > thres_shake) && (millis() > 10000))
shake = TRUE;
//This triggers the hippo_shake
if (shake == TRUE)
{
hippo_shake(shake_type, shake_iterations);
/*if (event_being_pub == FALSE)
{*/
/*Particle.publish("bz/dad_play", "1");
event_being_pub = TRUE;
delay(6000);*/
/*}*/
}
}
////////////////////Functions/////////////////
int window_size( String speed ) //must return type int, and take an argument type string
{
int window_convert = speed.toInt();
int thres_shake = constrain(window_convert,0,600);
return 1;
}
void hippo_shake(int shake_type, int shake_iterations)
{
for (int p=1; p< shake_iterations; p++)
{
myServo.write(pos1);
delay(quickness);
myServo.write(pos2);
delay(quickness);
shake = FALSE;
}
}
void event_driven(const char *event, const char *data)
{
String hello = data;
int cmd_speed = hello.toInt();
}
void send_info_to_serial(int xRead, int xaverage, int yRead, int yaverage, int zRead, int zaverage)
{
Serial.print(" ");
Serial.print("x: ");
Serial.print(xRead);
Serial.print(" ");
Serial.print(xaverage);
Serial.print(" | y: ");
Serial.print(yRead);
Serial.print(" ");
Serial.print(yaverage);
Serial.print(" | z: ");
Serial.print(zRead);
Serial.print(" ");
Serial.println(zaverage);
}
int servoControl(String command)
{
// Convert
int newPos = command.toInt();
// Make sure it is in the right range
// And set the position
servoPos = constrain( newPos, 0 , 180);
// Set the servo
myServo.write( servoPos );
// done
return 1;
}
/////////////////variable changes for tuning/////////////////
int position1(String command)
{ // Convert
int newPos1 = command.toInt();
// Make sure it is in the right range
// And set the position
pos1 = constrain( newPos1, 0 , 180);
return 1;
}
int position2(String command)
{ // Convert
int newPos2 = command.toInt();
// Make sure it is in the right range
// And set the position
pos2 = constrain( newPos2, 0 , 180);
return 1;
}
int quick(String command)
{ // Convert
quickness = command.toInt();
return 1;
}
int shake_iterate(String command)
{ // Convert
shake_iterations = command.toInt();
return 1;
}
int shaking_type(String command)
{ // Convert
shake_type = command.toInt();
return 1;
}This project is only listed in this pool. Be considerate and think twice before sharing.
A hands-on introductory course exploring the Internet of Things and connected product experiences.
This pair of connected soft toys help new parents connect with their babies even when they are away at work.
February 14th, 2017