
49-713 Designing for the Internet of Things
· 26 members
A hands-on introductory course exploring the Internet of Things and connected product experiences.
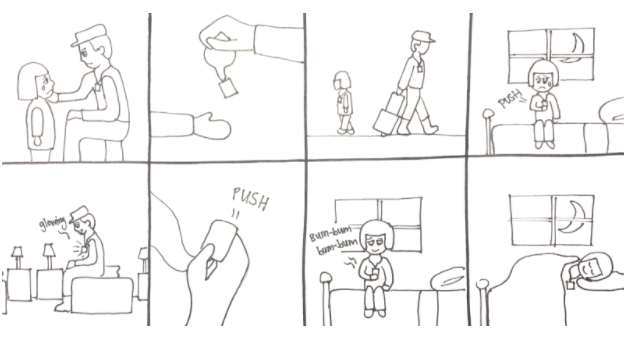
The goal of this project was to develop a pair of devices that could allow parents who become soldiers and go overseas to communicate in a meaningful way with their children. Long distances are tough for any relationship, so we hope that with our device we can keep relationships strong by providing a way to communicate in a unique way with a loved one.
A hands-on introductory course exploring the Internet of Things and connected product experiences.
The goal of this project was to develop a pair of devices that could allow parents who become soldiers and go overseas to communicate in a meaningful way with their children. Long distances are tough for any relationship, so we hope that with our device we can keep relationships strong by providing a way to communicate in a unique way with a loved one.
February 11th, 2017