Project Goal
Our project goal is to enhance the user experience of ordering and delivering DimSum in a Chinese brunch context.
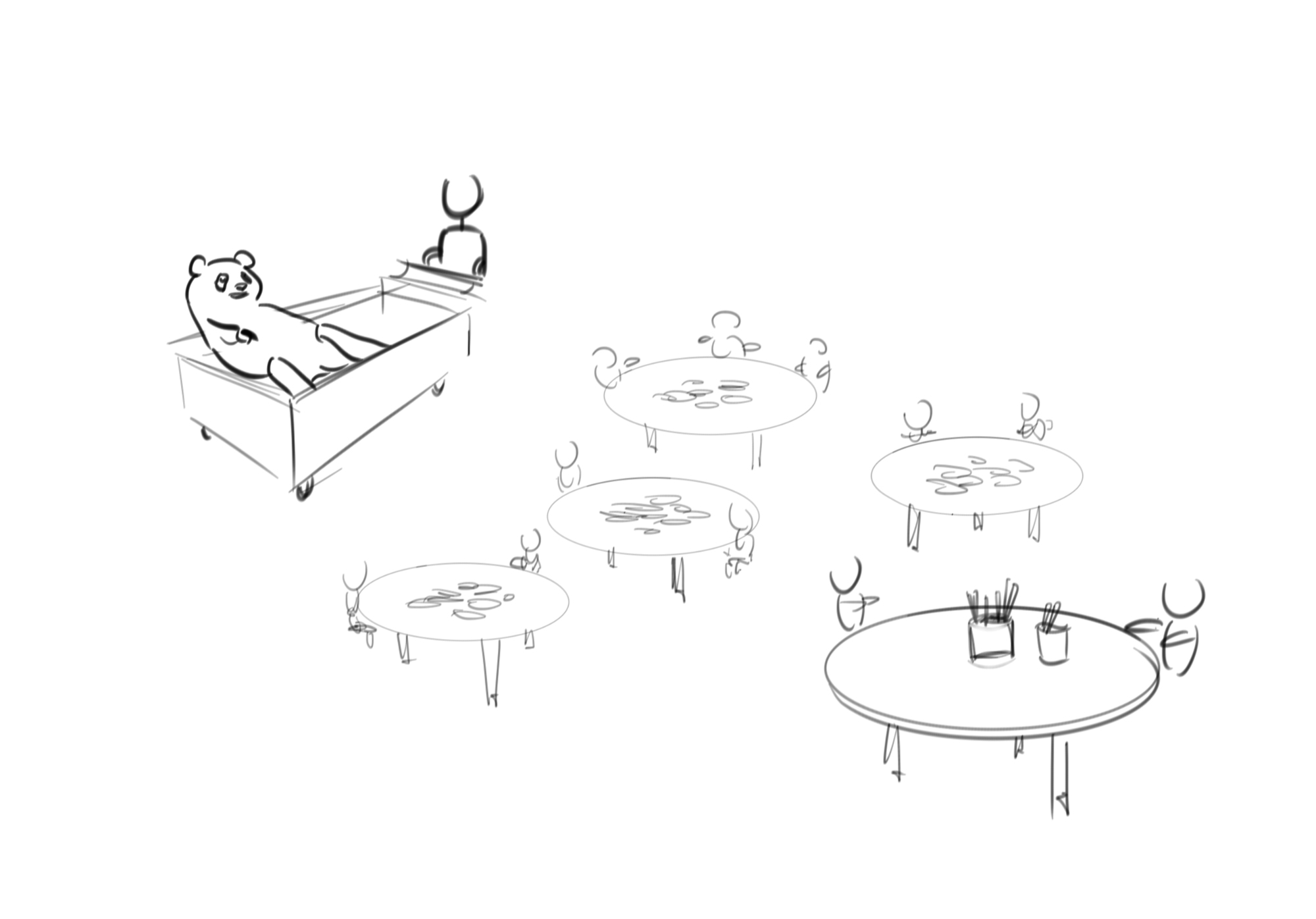
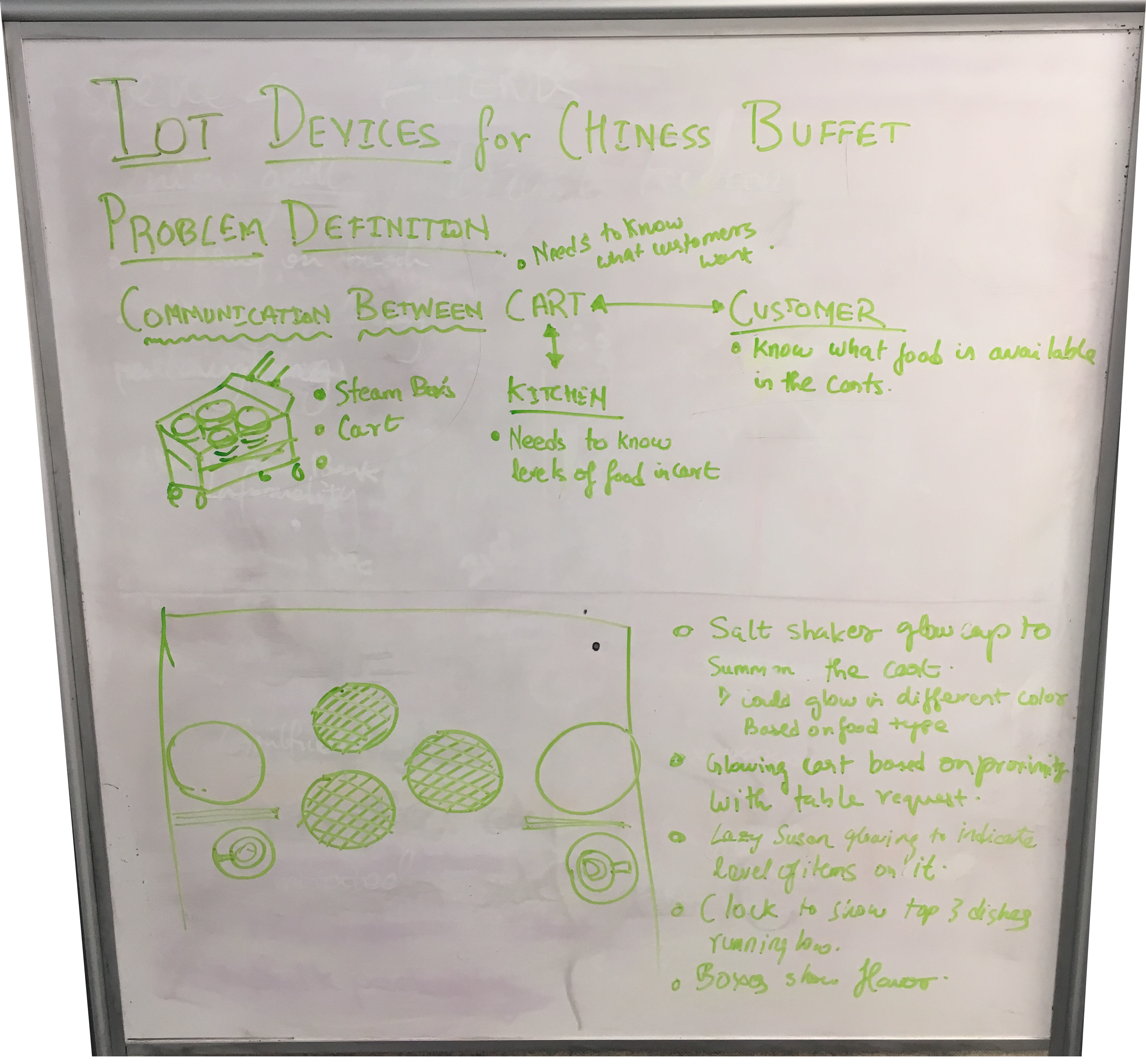
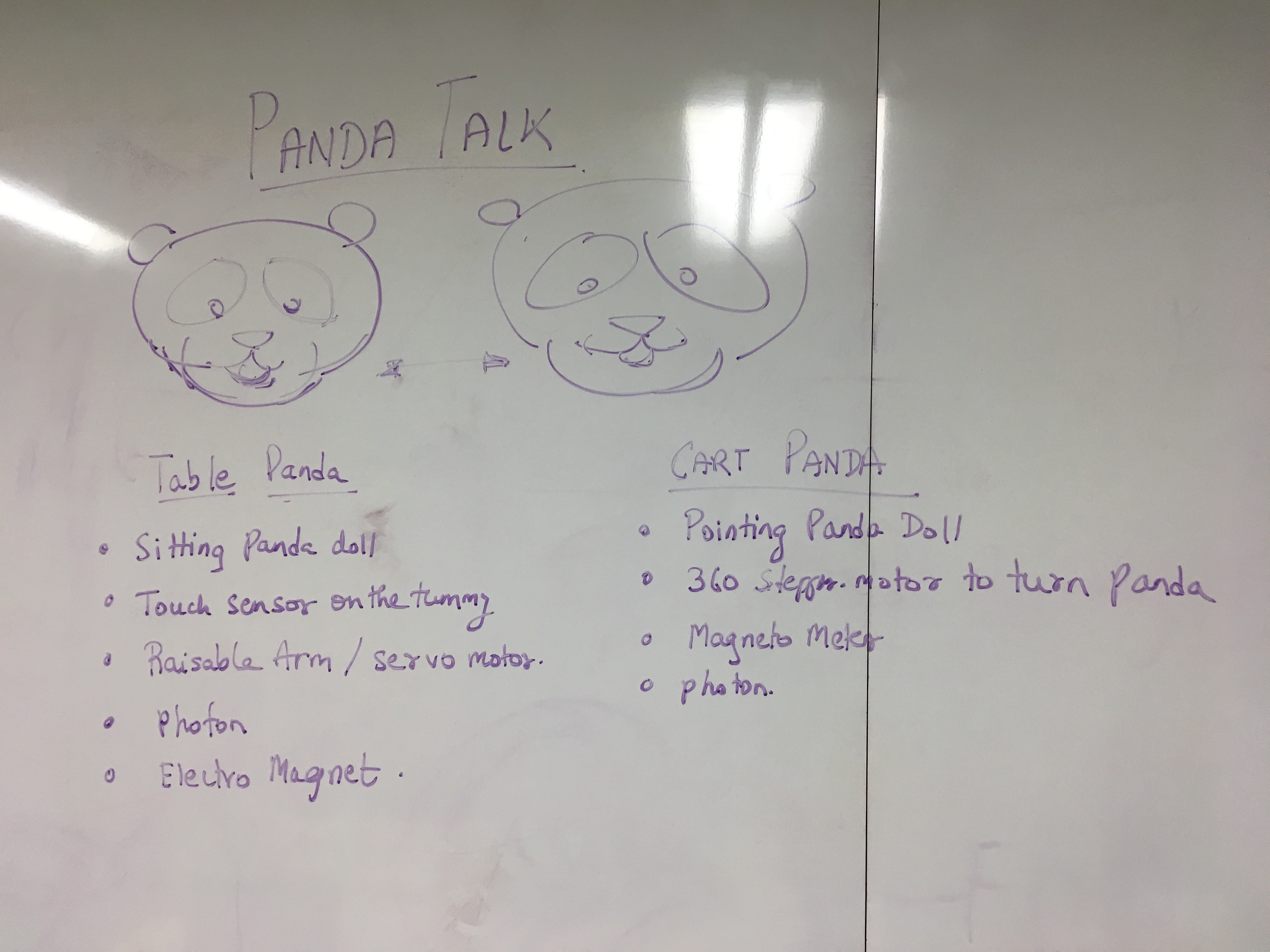
Dim Sum restaurant is a traditional place for Chinese elder people to spend hours hanging out with friends or families. The way ordering food works is there are food carts that keep moving around the restaurant with variety of Dim Sums and the customers pick what they want. Our mission was to make this ordering experience enjoyable and playful. So we decided to use two panda dolls to mimic the interaction between the customers and cart. Each customer is provided with a table panda, that upon pressing the belly, will raise its arm and turn on the electromagnet. This signifies the customer needs more food, and the cart panda points to the closest table panda that has the arm raised.
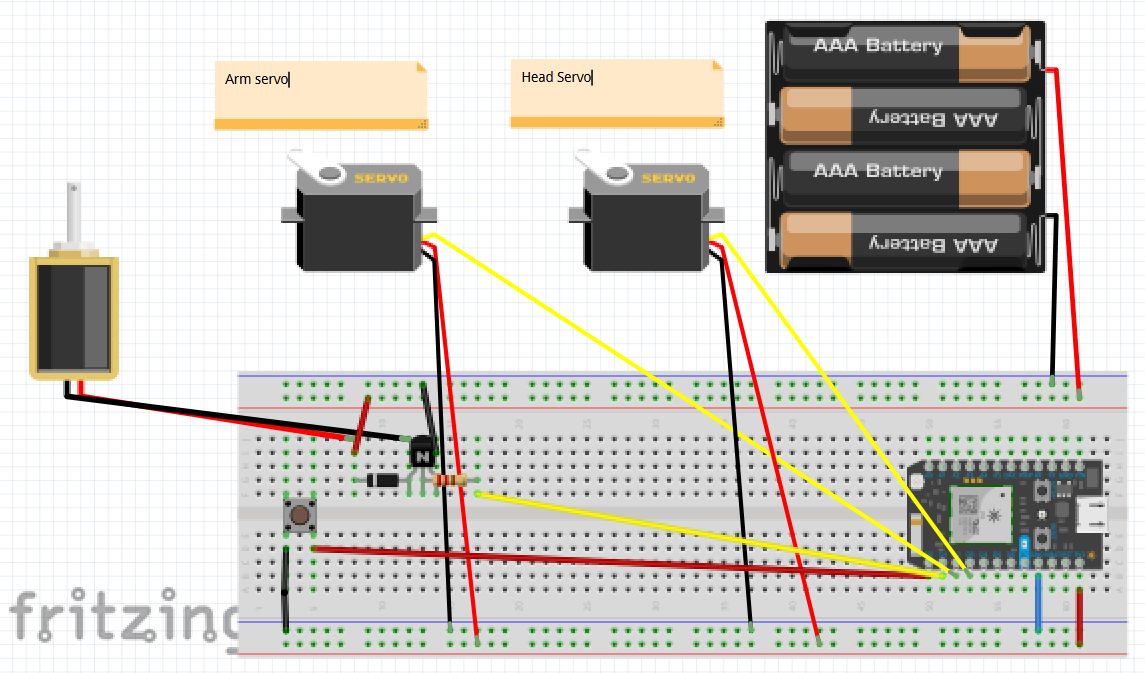
Photons - x 2
Breadboard - x 2
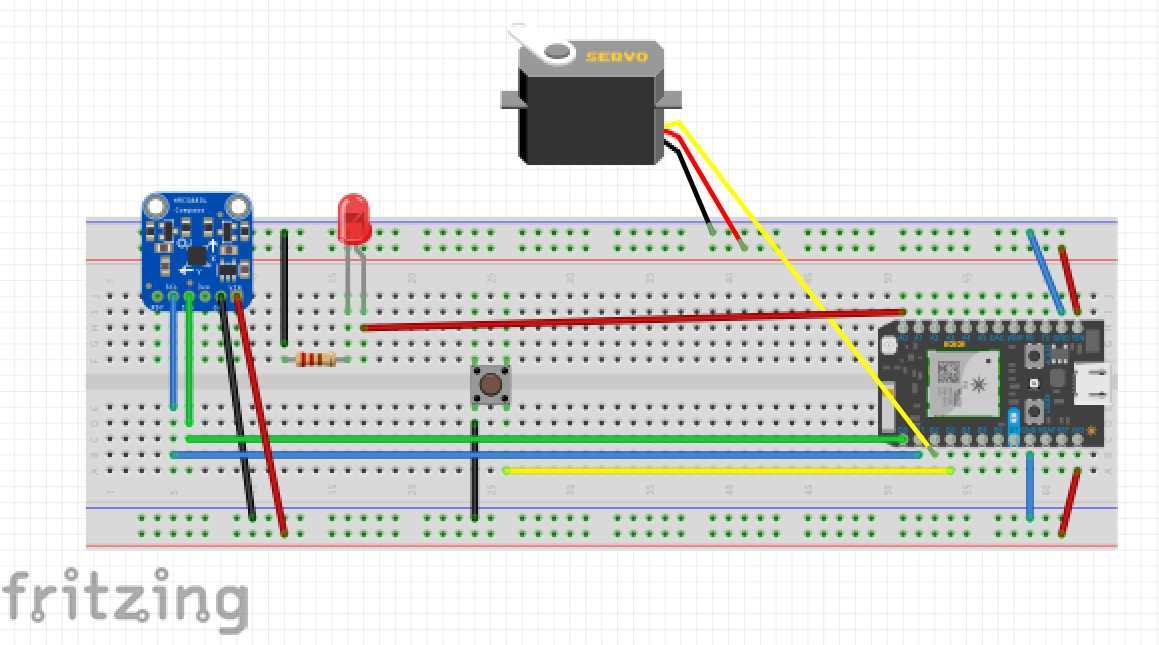
Electromagnet - x 1
Panda stuffed dolls - x 2
Magnetometer - x 1
Wooden box - x 2
Servo motor - x 3
PN2222 Transistor - x 1
1N4001 diode - x 1
270 Ω Resistor (red, purple, brown stripes) - x 1
Led - x 1
Push button - x 1
Lever button - x 1
Lego arm and head assembly
We as a group had difficulty to get the magnetometer sensor to detect the electromagnet as it was very noisy and hard to triangulate the source of the magnetic field accurately.
If we had more time we would explored IR sensor and triangulation as shown in this Cornell project https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2004/rd73/476finalpro.htm
or hack a indoor navigation systems like;
https://www.infsoft.com/solutions/indoor-navigationlike
It was hard to get the nodding and panda arm raise as we expected. Couple of reasons was the torque of the servo motor was not enough and the stuffed doll form factor was resisting as we repurposed it for the proof of concept. If we could have built the panda doll from scratch factoring in the arm and nodding structure we could have got the working more as we wanted.
Make the Panda location and pointing by the cart panda more robust
Make the form factor of the panda movement more robust
Explore how the we can expand this idea to restaurants other than dim sum diners.
We could also explore ways for the customers to specify the type of food along with the panda belly push.
Explore ways to predict or communicate demand in real time based on Dim Sums being ordered by customers to the kitchen.
You can upload files of up to 20MB using this form.