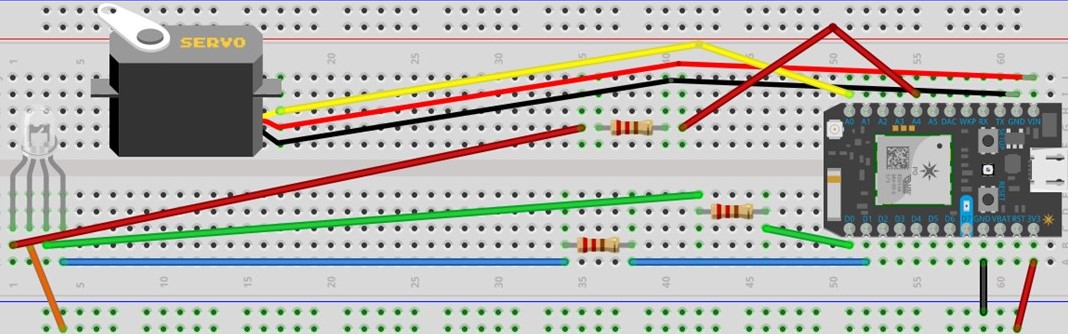
int servoPin = A5;
Servo myServo;
int servoPos = 0;
int redPin = A4; // RED pin of the LED to PWM pin **A4**
int greenPin = D0; // GREEN pin of the LED to PWM pin **D0**
int bluePin = D1; // BLUE pin of the LED to PWM pin **D1**
int redValue = 255; // Full brightness for an Cathode RGB LED is 0, and off 255
int greenValue = 255; // Full brightness for an Cathode RGB LED is 0, and off 255
int blueValue = 255;
int pos = 10;
int SleepLost;
void setup() {
// attaches the servo on the A7 pin to the servo object
myServo.attach( A5 );
//Register our Particle to control the servo
Particle.function("servo", servoControl);
// Keep a cloud variable for the current position
//Particle.variable( "servoPos" , &servoPos , INT );
Particle.variable( "SleepLost" , &SleepLost , INT );
pinMode( redPin, OUTPUT);
pinMode( greenPin, OUTPUT);
pinMode( bluePin, OUTPUT);
}
void loop() {
}
int servoControl( String command )
{
// Convert
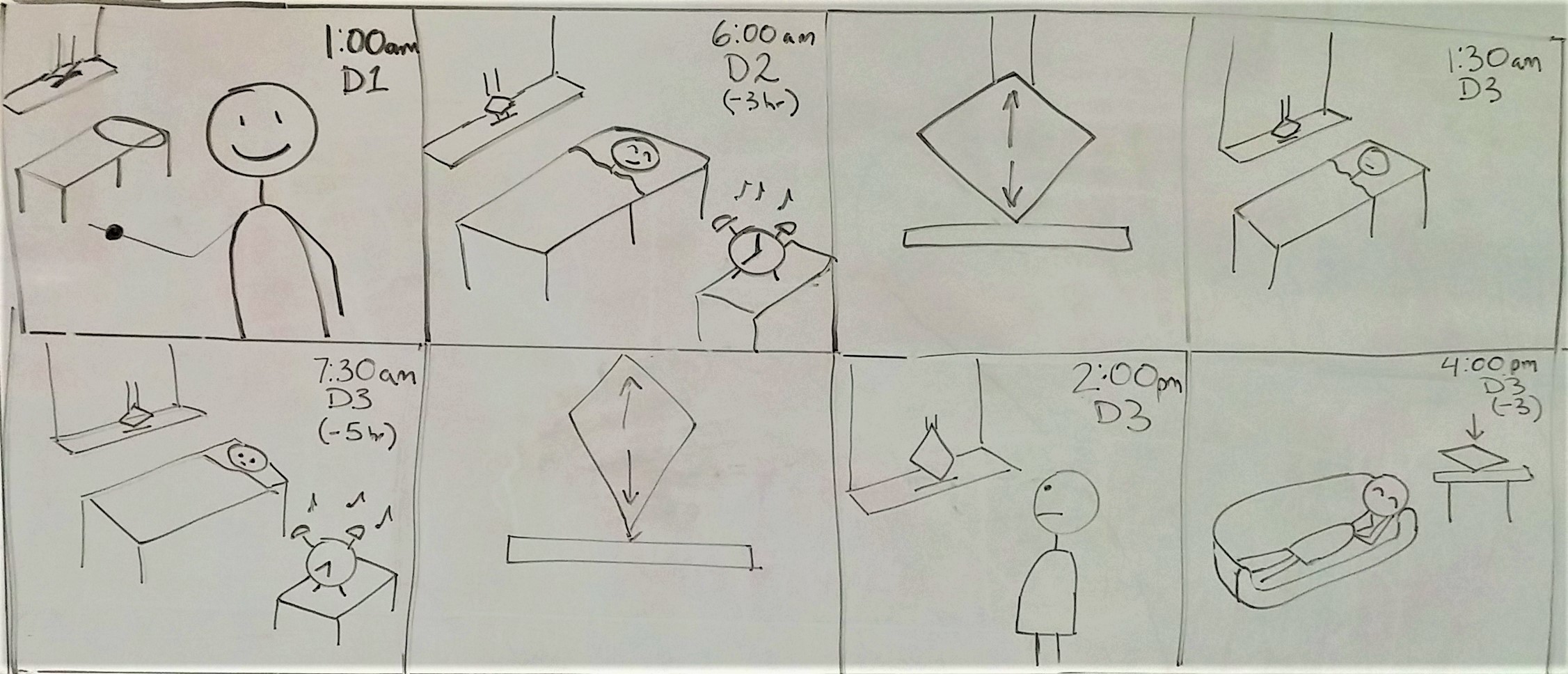
int hours = command.toInt();
if ( hours > 8)
{
pos = 83;
servoWrite ( pos );
blueValue = 255;
analogWrite(bluePin, blueValue);
}
else if ( hours > 6)
{
pos = 75;
servoWrite ( pos );
blueValue = 204;
analogWrite( bluePin, blueValue);
}
else if( hours > 4 )
{
pos = 60;
servoWrite ( pos );
blueValue = 153;
analogWrite( bluePin, blueValue);
}
else if( hours > 2)
{
pos = 45;
servoWrite ( pos );
blueValue = 102;
analogWrite( bluePin, blueValue);
}
else
{
pos = 20;
servoWrite ( pos );
blueValue = 0;
analogWrite( bluePin, blueValue);
}
return 1;
}
void servoWrite( int a ){
// Convert
int newPos = a;
// Make sure it is in the right range
// And set the position
servoPos = constrain( newPos, 0 , 180);
// Set the servo
myServo.write( servoPos );
// done
}
Click to Expand